Prototyping a low-cost continuous GNSS monitoring network for positioning and atmospheric purposes in Ghana
Imagine you bought a plot of land and need to map the exact boundaries. However, your positioning device (often referred to as GPS) can only measure up to several meters of accuracy unless you rent a very expensive positioning instrument. This situation can now be overcome thanks to a new low-cost, yet accurate positioning device.
Here, we present cost-efficient autonomous GNSS monitoring units (Figure 1) that can act as a base station. To achieve high-precision positioning results with GNSS, surveying tasks are traditionally realized in a base-rover setup. While the base station is usually installed at a fixed location and does not move, the associated rover (e.g. another low-cost GNSS receiver) can be a moving device to perform the actual positioning tasks. This allows us to accurately map our environment (e.g. river beds, roads, property boundaries, …). Our low-cost GNSS units transmit data in real-time and archive it continuously for post-processing purposes. The observations are also highly valuable to obtain water vapor measurements to improve rainfall models. The nature of the implementation allows integration of the system directly into the near-real-time Zenith Tropospheric Delay (ZTD) monitoring network presented by TWIGA (here). The device has been optimized to work off-grid and will soon see its first use in Kumasi in Ghana.

Figure 1: Prototype of the GNSS monitoring unit in Delft, The Netherlands 
Figure 2: Stylish setting up a prototype GNSS monitoring unit.
Background
In the past decades, high-precision GNSS analysis was limited to using a combination of expensive, high-end dual-frequency receivers and antennas. Though low-cost GNSS receivers are common for many years (e.g., in your smartphone), they were limited to using only a single frequency. Since the use of GNSS measurements on only a single frequency exposes the measurements to huge errors caused by the ionosphere, the efficient use of these for atmospheric (or high-precision positioning) purposes requires e.g., extensive modeling or an already existing dual-frequency GNSS network outside of the installation area. This is not given in great parts of Sub-Saharan Africa.
Recent technology advances, however, introduced low-cost dual-frequency GNSS receivers. Previous case studies highlighted the potential of combining low-cost dual-frequency receivers and antennas. Here we showcase the design and implementation of an autonomous GNSS monitoring unit, suitable for use in the sub-Saharan context, based on such a setup.
Use in Ghana
In Kumasi in Ghana lives Stylish Amankwah. He is a co-founder of Maptech logistics, a company that focuses on using Geographic Information Systems (GIS) technology to solve business problems. He provided a lot of useful insight into the design process to make the device suitable for the Ghanian context and tested the first prototypes on location (Figure 2). Soon his company will be managing the first network of GNSS base stations in Kumasi and also make sure that the network will be exploited for surveying purposes.
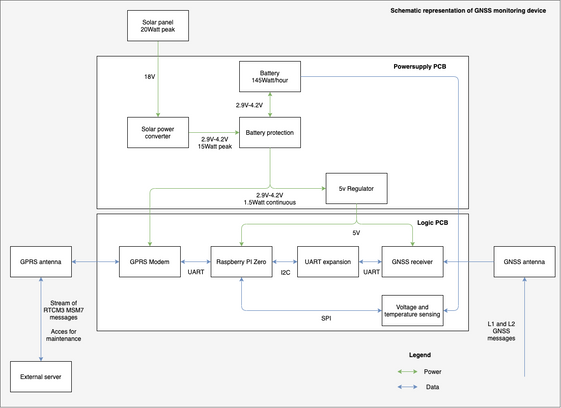
Figure 3: Schematic representation of the GNSS monitoring unit. 
Figure 4: The GNSS monitoring device main unit with the door opened.
Design choices
For the scope of this work, two Printed Circuit Boards (PCB) were designed and produced. The first PCB, the power supply, consists of a lithium battery with protective features, a solar power converter, and a 5V regulator. The second PCB, the logic board, consists of a GPRS modem and contains headers to which a GNSS receiver and Raspberry Pi can be plugged. This logic PCB acts as the mainboard handling the data flow from one component to the other. All information sources come together at the Raspberry Pi. The schematic representation of this device can be seen in Figure 3.
The PCBs have been combined in a generic watertight enclosure. The enclosure contains a power button, removable connectors for the antennas and solar panel, and a drain for condensation water (Figure 4). Even at low production numbers, the unit price is below 600 Euros
The fundamental principle is that the receiver (the GNSS station) transmits the data in real-time to a central server that handles the data logging and distribution to potential users. Besides the hardware integration, we also prepared a software package that can manage and monitor the GNSS data streaming and logging.
In principle, the Raspberry Pi Zero generates RTCM3 MSM7 messages which contain the GNSS observations and transmits them to the server in real-time (with a 1-second sampling interval) via a mobile GPRS internet network. The receiver software is highly configurable with simple steps. It allows using the receiver not only in real-time streaming applications but also for logging-only purposes on the local SD card in case of campaign surveying.
The server acts as a monitoring, archiving, and control unit for the GNSS clients. This is realized as an Amazon Lightsail instance of the lowest-cost plan (3.50$+VAT per month). The real-time streaming management is managed using the NTRIP protocol of a previous version of the BKG NTRIPcaster which is free to use. Multiple Python scripts manage the file archiving and streaming setups.
Due to the nature of the RTCM stream utilizing the NTRIP protocol, the real-time streams can be directly used in RTK mode by other GNSS receivers (low-cost or high-end ones). However, they can also be integrated directly into the current TWIGA near-real-time network to monitor the troposphere (here). For post-processing purposes, the data is down-sampled and stored with a sampling rate of 30-seconds which is sufficient for a wide range of potential applications.
RELATED TWIGA SERVICE: GNNS for FLOOD PLAINS & ATMOSPHERIC MOISTURE
Written by:
Andreas Krietemeyer and Peter Verweij,
TU Delft
